1) Brownian model

Brownian模型
1.
As a model approximating queueing network systems,Brownian model is obtained through proper scale of the original model based on heavy load theory.
Brownian模型是排队网络的一种近似模型,它以重载流理论为基础,通过对原模型进行适当的时空缩放后取极限而得到的。
2) Brownian sheet
Brownian单
1.
On the functional form of Lévy moduls of continuity for Brownian sheet in Hlder norm;
Brownian单在Hlder范数下的泛函Lévy连续模
2.
Lower bound of functional limit theorem of increment for Brownian sheet in Hlder norm;
Brownian单的增量在Hlder范数下的泛函极限定理的下界
3.
Upper bound of functional limit theorem of incrementfor Brownian sheet in Hlder norm;
Brownian单的增量在Hlder范数下的泛函极限定理的上界
3) Generalized Brownian Sheet
广义Brownian Sheet
1.
The Hausdorff Measure of Image Sets and Graph Sets of N-Parameter d-Dimensional Generalized Brownian Sheet;
N指标d维广义Brownian Sheet的像集及图集的Hausdorff测度
4) Feller-Brownian motion
Feller-Brownian运动
1.
In this paper we present Feller-Brownian motion.
本文主要对Feller-Brownian运动进行了研究。
5) Brownian motion
Brownian运动
1.
The accuracy of conflict detection is improved and the rate of false alerts is reduced, especially for short range detection by a probabilistic conflict detection algorithm based on Brownian motion.
为了提高空中冲突探测的准确性,解决现有算法存在较高误报率的问题,特别是减少短期冲突探测中误报的情况,该文提出了一种基于Brownian运动的概率型空中交通冲突探测算法,将飞机的飞行转化为带约束的Brownian运动,并在该算法的计算过程中引入冲突预估时间段作为冲突探测的参数之一,通过近似展开得到冲突探测的解析表达式。
6) Brownian bridge measure
Brownian桥测度
1.
For the L_p-norm approximation,we determine the weakly asymptotically order for the p-average errors of Lagrange trigonometric interpolation polynomial sequence and Jackson trigonometric interpolation polynomial sequence based on the equidistant interpolation points on the Brownian bridge measure.
在L_p-范数逼近的意义下,本文确定了基于等距插值节点的Lagrange三角多项式插值列和Jackson三角多项式插值列在Brownian桥测度空间下的。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果

第一步,如图所示将窗口分为四个视图

第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
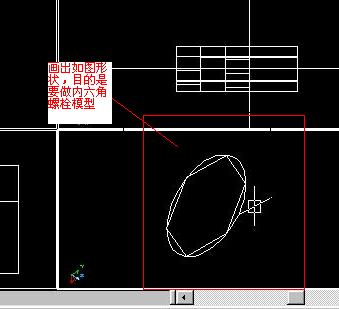
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集

第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条