1) Friction identification

摩擦辨识
2) tribological systemic condition identification
摩擦学状态辨识
1.
In order to solve the problem of knowledge acquisition in tribological systemic condition identification which mainly depends on human s experience nowadays,the idea of knowledge discovery was adopted herein.
摩擦学状态辨识实质上是分类问题,针对以往机器摩擦学状态判别主要依靠人工经验来完成所存在的缺陷,用知识发现的思想来解决摩擦学状态辨识的知识获取问题。
3) Friction coefficients identification
摩擦系数辨识
4) tribo-system condition identification
摩擦学系统状态辨识
1.
On the basis of analyzing the studying status in mathematic method previously used in tribo-system condition identification,the author put forward a new method for tribo-system condition recognition-SPA(Set pair analysis).
在分析摩擦学系统状态辨识方法的研究状态的基础上,提出了一种应用集对分析方法来实现摩擦学系统状态辨识的新方法。
2.
The intelligence of tribo-system condition identification mainly reflects on two aspects: one is to estimate wear state of machine s tribo-system according to monitoring information with some mathematical methods; the other is to identify wear state by tribo-system condition identification knowledge which is acquired with knowledge acquisition methods.
摩擦学系统状态辨识经过近20年的发展,现在正朝着智能化方向发展。
5) State recognition of tribology
摩擦学状态辩识
6) Intellectual property right friction
知识产权摩擦
补充资料:摩擦学:滚动摩擦
滚动摩擦
两相互接触的物体有相对滚动或有相对滚动趋势时的摩擦。滚动摩擦的机理不同於滑动摩擦﹐它主要来源於滚动体在接触区域產生弹-塑性变形﹐在以接触点(或线)为中心的接触区内接触压力分布不对称﹐致使支承面的反力N 发生偏心﹐并產生摩擦力F (见图 滚动摩擦示意图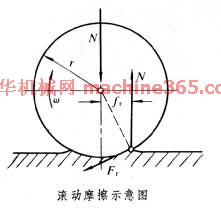 )。用表示法向反力N 到接触点的距离﹐根据力的平衡条件可得
)。用表示法向反力N 到接触点的距离﹐根据力的平衡条件可得

式中为滚动体半径﹔为滚动摩擦係数﹐它的量纲为长度﹐其值与接触面的材料﹑粗糙度﹑温度和湿度等因素有关。
两相互接触的物体有相对滚动或有相对滚动趋势时的摩擦。滚动摩擦的机理不同於滑动摩擦﹐它主要来源於滚动体在接触区域產生弹-塑性变形﹐在以接触点(或线)为中心的接触区内接触压力分布不对称﹐致使支承面的反力N 发生偏心﹐并產生摩擦力F (见图 滚动摩擦示意图
)。用表示法向反力N 到接触点的距离﹐根据力的平衡条件可得 式中为滚动体半径﹔为滚动摩擦係数﹐它的量纲为长度﹐其值与接触面的材料﹑粗糙度﹑温度和湿度等因素有关。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条