1) point-by-point measurement,point by point survey

逐点测量<测>
2) per-spot way
逐点测量法
1.
The factors influencing the measure precision were analyzed with emphasis,such as multi-spots way and per-spot way, and the measure precision were compared,and the adverted problems in using the three measure methods were put forward.
重点分析了影响多点测量法、逐点测量法测量精度的因素,并对其测量精度进行了比较,提出了三种测量法在使用时应注意的问题。
3) prediction point-by point
逐点预测
4) point by point detection
逐点检测
1.
This article discussed the working principle of LED display point by point detection system,mainly including the detection principle of the LED driver chip with detection function,the read data error detection and data transmission.
论述了LED显示屏逐点检测系统的工作原理,主要包括带侦测功能的LED驱动芯片的侦测原理、错误侦测数据的读取以及数据的传输。
5) Turn-by-turn system
逐圈测量
1.
In this paper, the turn-by-turn system of Hefei Light Source (HLS), and the log-ratio electronics circuit with working frequence 408MHz (2*RF of HLS) are described.
介绍合肥光源 (HLS)逐圈测量系统和工作在 4 0 8MHz的对数比率电子学处理系统的原理和性能 。
6) Hourly measurement
逐时测量
补充资料:长度测量工具:测长机
以线纹尺的刻度或光波波长作为已知长度﹐利用机械测头进行接触测量的光学长度测量工具(图1 测长机 )。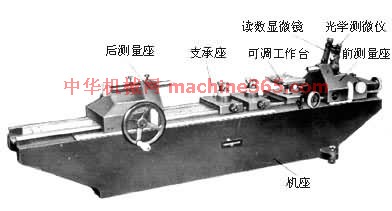 测长机具有能在3个坐标内移动和2个坐标内转动的可调工作台﹐还带有不同测头和附件﹐常用於检定大尺寸量块和测量多种工件的内﹑外尺寸。测长机有 1米﹑3米﹑6米和6米以上等几种测量范围﹐分度值通常为1微米。为求结构紧凑﹐多数测长机不採用阿贝原则(见长度测量工具)﹐而採用爱宾斯坦光学系统。这种光学系统能自动补偿由於导轨直线度误差引起的测量误差。
测长机具有能在3个坐标内移动和2个坐标内转动的可调工作台﹐还带有不同测头和附件﹐常用於检定大尺寸量块和测量多种工件的内﹑外尺寸。测长机有 1米﹑3米﹑6米和6米以上等几种测量范围﹐分度值通常为1微米。为求结构紧凑﹐多数测长机不採用阿贝原则(见长度测量工具)﹐而採用爱宾斯坦光学系统。这种光学系统能自动补偿由於导轨直线度误差引起的测量误差。
测量范围在1米以内的习惯上称为测长仪(图2 测长仪 )﹐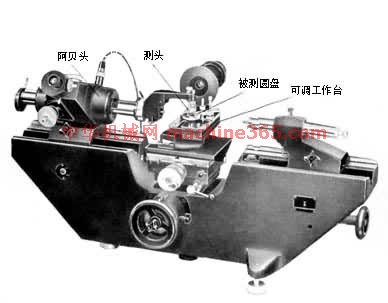 它利用读数显微镜和带有线纹尺的测量轴组成的测量系统(习惯上称为阿贝头)进行接触测量。阿贝头的示值范围一般为 100毫米。测长仪有立式和卧式两种。它的结构设计一般符合阿贝原则﹐故通常也称为阿贝测长仪。立式测长仪和卧式测长仪的测量范围通常分别不大於250毫米和600毫米(测量范围大於100毫米时需要用量块调整零位)。前者主要用於测量外尺寸﹐后者主要用於测量较大工件或在立式测长仪上不易定位的工件如圆盘等的内﹑外尺寸等。
它利用读数显微镜和带有线纹尺的测量轴组成的测量系统(习惯上称为阿贝头)进行接触测量。阿贝头的示值范围一般为 100毫米。测长仪有立式和卧式两种。它的结构设计一般符合阿贝原则﹐故通常也称为阿贝测长仪。立式测长仪和卧式测长仪的测量范围通常分别不大於250毫米和600毫米(测量范围大於100毫米时需要用量块调整零位)。前者主要用於测量外尺寸﹐后者主要用於测量较大工件或在立式测长仪上不易定位的工件如圆盘等的内﹑外尺寸等。
测长机具有能在3个坐标内移动和2个坐标内转动的可调工作台﹐还带有不同测头和附件﹐常用於检定大尺寸量块和测量多种工件的内﹑外尺寸。测长机有 1米﹑3米﹑6米和6米以上等几种测量范围﹐分度值通常为1微米。为求结构紧凑﹐多数测长机不採用阿贝原则(见长度测量工具)﹐而採用爱宾斯坦光学系统。这种光学系统能自动补偿由於导轨直线度误差引起的测量误差。 测量范围在1米以内的习惯上称为测长仪(图2 测长仪 )﹐
它利用读数显微镜和带有线纹尺的测量轴组成的测量系统(习惯上称为阿贝头)进行接触测量。阿贝头的示值范围一般为 100毫米。测长仪有立式和卧式两种。它的结构设计一般符合阿贝原则﹐故通常也称为阿贝测长仪。立式测长仪和卧式测长仪的测量范围通常分别不大於250毫米和600毫米(测量范围大於100毫米时需要用量块调整零位)。前者主要用於测量外尺寸﹐后者主要用於测量较大工件或在立式测长仪上不易定位的工件如圆盘等的内﹑外尺寸等。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条